Angular Momentum
Table of Contents
Time derivatives in a rotating frame
Let  ,
,  and
and  be unit basis vectors in the rotating frame, with a rotational speed of
be unit basis vectors in the rotating frame, with a rotational speed of  about the axis
about the axis  .
Letting
.
Letting  be the unit vector in this frame, we have:
be the unit vector in this frame, we have:
Then if we have a function  , taking the derivative in the rotational frame :
, taking the derivative in the rotational frame :
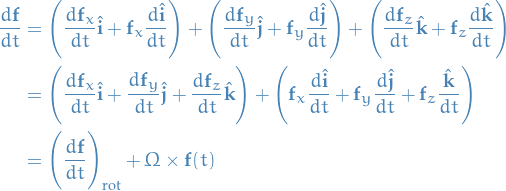
Which describes the change of wrt.  using the rotational frame.
using the rotational frame.
Euler's Equations (rigid body dynamics)
From Time derivatives in a rotating frame we have:

where  is the moment of inertia tensor calculated in the intertial frame .
is the moment of inertia tensor calculated in the intertial frame .
It's often more useful to change to coordinates to the rotating frame .
With rotating frame we mean that the coordinate axes are rotating about a fixed axis.
Why is this useful? In this frame the moment of inertia tensor is constant (and diagonal)!
Moment of inertia
Covariance and contravariance
- Describe how the quantitive description of a certain geometric or physical entities change with a change of basis
Covariance
- Components of a covector change in the same way as changes in scale of the reference axes → the covector and the reference axes are covariant
Contravariance
- Components of a contr